


Draekhar
-
Mensajes
1469 -
Ingresó
-
Última visita
11 Seguidores


.thumb.jpg.06aa4fda7b2072243b7288bd77aad35f.jpg)







Visitantes recientes al perfil
10317 visitas al perfil

.thumb.jpeg.e6d6690badb873468322b08d0d56bd77.jpeg)

Logros de Draekhar
")





-
En mi caso monto 205/60/R16, y normalmente sigo las presiones de la etiqueta, llevando 2.6 delante (que es lo que me indica para cualquier escenario), y las traseras entre 2.4 que recomienda en vacío y 2.6 que recomienda estando cargado creo recordar, asique acabo dejándolas en 2.5 ya que suelo llevar cosas en el maletero o ir con algún pasajero. Las presiones que nunca he empleado son las de confort en ninguno de los coches, ya que siempre me han parecido un poco bajas para uso continuo
-

Instalar luz de cortesía puertas a4 b9
Draekhar responde a Juan35 de discusión en Electricidad Audi A4 B9
A mi me pasó lo mismo al verlo, viniendo del B7 que lo tiene me parecía un atraso que no las tuviera. En su momento también las instalé metiéndoles bombillas led además y muy contento con el resultado. -
Buscando opiniones
Draekhar responde a golytoiv de discusión en Audi A4 / Allroad B9 (A partir de 2015)
Buenos días, enhorabuena y muy bonita unidad. Aquí seguramente te vas a encontrar un poco de todo en cuanto a opiniones, a mi me pasa como a Gabriel que me gustan más los cromados y el toque que le da al coche, y en especial en estos modelos que lo usan también en los pilotos traseros etc. -
Buenas tardes, Estaba buscando una buena pantalla para un Audi a3 8p, he estado viendo varios modelos por ahí pero como siempre con estas cosas a veces las valoraciones o no hay muchas o dejan que desear. ¿hay algún modelo además de los que comentan los compañeros de forma más reciente que recomendéis? Preferentemente estoy en busca de un modelo con botones, no de la que es toda pantalla táctil. El equipo de sonido que tiene es el habitual estándar que viene con la Audi Concert, nada de BOSE ni por el estilo. He estado viendo que hay mucho modelo pero con 2GB de RAM, no se que experiencia tenéis actualmente si hay algún compañer@ que tenga una con 2GB de RAM ya que más bien pensaba en una de 4GB para que vaya más ligera aunque su uso principal será para escuchar música, conectar un teléfono con android auto para el resto y aprovechar a instalar una cámara de marcha atrás con la pantalla. Gracias de antemano!
-
También suele tener el coche una pegatina con los códigos de la configuración de equipamiento que tienes en tu coche, creo que suele estar en el hueco de la rueda de repuesto aunque no se si puede variar en según que modelo. Al ser todo códigos puede que tengas que hacer búsqueda por ellos en internet para ver cual es cual, pero es una opción que tienes también.
-
Lo del bote de anticongelante me imagino que lo comentará el compañero por si te está mezclando aceite con anticongelante que hace que te suba el nivel (se suele ver porque baja el anticongelante y el aceite pasa a ser como lechoso), pero sino como comenta @Carlisu84 siempre y cuando se revise en una misma temperatura o similar debería medir igual o con muy poco margen de cambio.
-
¿Alguien ha pasado de led a matrix led?
Draekhar responde a bloky de discusión en Audi A4 / Allroad B9 (A partir de 2015)
Yo lo pensé en su día y lo estuve mirando también, porque cambiar solo de xenón a led pues tampoco veía una diferencia notable como para meterme en el cambio y miré los matrix. Pero para hacerlo con seguridad con recambio original y todo eso para tener luego también las mínimas complicaciones en ITVs etc por le tema homologaciones, subía tanto que lo descarté. Buscando buenos precios lo que me encontré es que ya te gastas esos 2000€ prácticamente solo en el par de faros, no se como andarán los precios a día de hoy pero no creo que haya variado mucho la cosa -
Activación del line assistant con OBDEleven
Draekhar responde a nomtoni de discusión en OBDEleven A4 B9
Yo pienso que deberían, quiero decir, si antes te funcionaban sistemas y tras el cambio han dejado de hacerlo apareciéndote un error encima. En el error además podrás ver de que fecha es el mismo, si encima cuadra con la intervención... mas claro agua. Otra cosa es que vayan a querer hacerlo, pero si el coche entró funcionando debería salir igual. -
Efectivamente reprogramar para que haga otra cosa que sepa no se puede, a mi tampoco se me ha dado el caso pero si he leído siempre desde modelos anteriores que hay gente que le pasaba por pulsaciones accidentales. Lo que si me sonaba que era posible hacer efectivamente es lo que has conseguido de configurar el tiempo de pulsación.
-
¿Alguien ha pasado de led a matrix led?
Draekhar responde a bloky de discusión en Audi A4 / Allroad B9 (A partir de 2015)
@vneon_th @alagar27 no me suena en el foro haberlo leído pero si que hay un post en audiworld que tengo fichado en el que detallan el procedimiento, o sea posible es, otra cosa es por costes ya que normalmente los faros matrix dependiendo de si se encuentran unas buenas unidades usadas o si vas por unos nuevos que pueden costar bastante. En teoría para las conversiones mencionan que hace falta a parte de los propios faros claro: - Unidad de control de los faros. - Unidad de potencia para los faros. - Cableado con las clavijas correspondientes para ellos. Y además para el proceso para codificar, calibrar etc: - Vag Can Pro (para flashear los módulos si son nuevos) - VCDS o equivalente que permita hacer long coding VCP. - ODIS Y aunque en unidades españolas es habitual tenerlo ya de serie, requiere tener la cámara delantera del parabrisas de asistencia a la conducción (ya que si es una unidad que no lo equipa requeriría también su instalación). -
En el MMI Plus en principio no es 100% necesario actualizar firmware ya que hay parches para las diferentes versiones de firmware. Aunque por lo general se suele hacer si se tiene una versión antigua ya metidos en faena. Un saludo!
-
Buenas tardes, Pues si no recuerdo mal en el menu principal del MMI, vas a ajustes y bajando hasta la ultima opción estaba lo de resetear ajustes. Creo que ponía algo como ajustes de fabrica o ajustes predefinidos, algo así. Y dentro te dejaba seleccionar los "modulos" del MMI que quieres devolver a ajustes de fábrica. Lo único "pesado" es que luego toca reconfigurar como cuando te dan el coche nuevo las cosas que hubieras personalizado etc. A ver si con suerte el reset te puede solventar el problema. Un saludo!
-
¿Qué le has hecho hoy a tu A4 B9?
Draekhar responde a alagar27 de discusión en Audi A4 / Allroad B9 (A partir de 2015)
Está curioso el invento y bajo mi punto de vista incluso preferible a los típicos que se montan en la rejilla del aire acondicionado o de los que tienes que pegar imanes en el salpicadero, pero si es cierto que como el resto de compañeros teniendo el manos libres del propio vehículo y si se tiene el android-auto/carplay un soporte suele pasar a un segundo plano salvo necesidades muy concretas. Pero aún así buen aporte para estos tipos de soportes por si alguien en algún momento busca algo del estilo. -
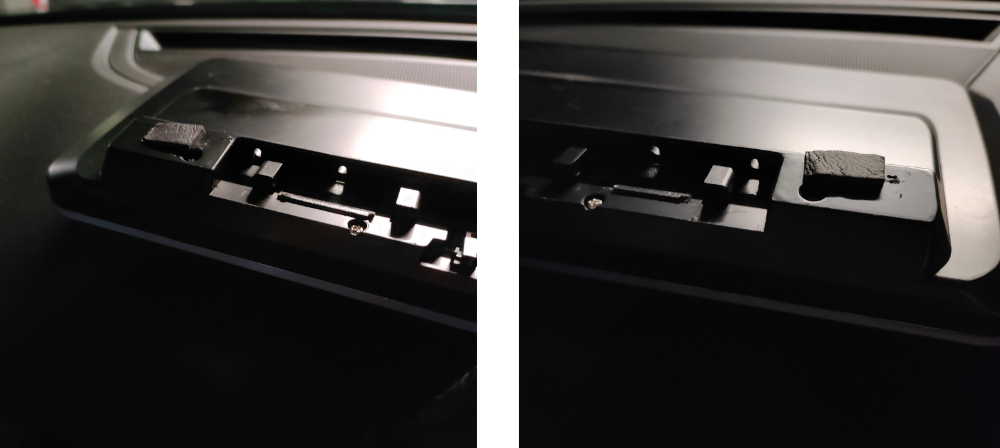
Buenas compañer@s, He tardado un poco entre unas cosas y otras pero el pasado finde me lie a renovar y añadir algunos pads adicionales de la cinta adhesiva que comentamos en el hilo que es como de espuma muy suave que se usa para el sellado de ventanas que apaña el tema de los sonidos de vibraciones por el mínimo gap entre pantalla y salpicadero que queda al instalar en el soporte algunos modelos de pantallas Android, aunque esta vez también he añadido unos trozos de espuma más firme que deforma menos que tenía por ahí de una carcasa de un disco duro (la típica para que no se mueva el disco dentro de la carcasa si es más pequeño). En mi caso se aplica a los modelos de pantalla Nunoo aunque algunos modelos creo recordar que eran similares en la forma del montaje etc. Por una parte volví a poner un par de trozos en la propia pantalla, de la de sellado de ventanas, que es más fina y se adapta más a la forma de contornos donde apoya: Y esta vez como comentaba añadí un par de trozos de la que es espuma más firme y un pequeño trozo de la de espuma selladora (los dos primeros trozos de arriba son de la que es más firme y la de abajo del todo es la que se usa para sellado de ventanas de espuma más suave, en el lado izquierdo del embellecedor igual, en la misma zona de ese lado): Con ello parece que al meterle esos de espuma un poco más firme incluso tiene ya menos juego que con solo la de sellado de ventanas que puse la primera vez (dentro del muy leve que tiene sin nada). De todas formas no descarto si encuentro en algún momento añadir algún pad de goma negra fina más rígidos similares a lo que comentaba @Hernán Diego en el hilo que puso en la suya, aunque con estos de la espuma más firme y la otra por lo general da muy buen resultado y te quita cualquier ruidillo ocasionado por las vibraciones. Un saludo!

-
Buenas, por curiosidad ¿has probado a hacer un reset de ajustes a fabrica? Ya que entiendo que con el reinicio del MMI te refieres a la combinación de botones para que se reinicialice haciendo el flujo de apagado-encendido. Es un poco rollo por el tema de que toca reconfigurar lo que tengas personalizado, pero si el problema te persiste es una opción a probar si no lo has hecho.